Welcome to IVSP!
지능형차량 신호처리 연구실(IVSP Lab)에 오신 것을 환영합니다.
IVSP Lab은 자율주행을 구성하는 다양한 기술들에 대한 활발한 연구를 진행하고 있습니다.
Learn more
국내외 자율주행을 선도할 핵심 인재 양성을
목표로 연구실이 운영되고 있으며, 자율주행 기술 고도화를 함께 이루어나갈 구성원을 모집합니다.
대학원 과정에서 본인이 원하는 자율주행 주제로 연구 진행이
가능하오니 많은 관심 바랍니다.
자율주행 영상 및 신호처리 기술
Camera image 및 Lidar point cloud 데이터 기반의 물체 인식 성능 개선 연구를 진행하고 있으며, 이와 더불어 물체 추적 및 예측 기술에 관한 연구도 진행 중에 있습니다.
Object Detection/Tracking/Prediction
딥러닝 기반의 물체 인식, 추적, 예측 기술 연구
Camera-based Perception
카메라 영상 처리 기술 및 인공지능 기반 인식 기술
Lidar-based Perception
라이다 포인트 클라우드 데이터 처리 기술 및 인공지능 기반 인식 기술
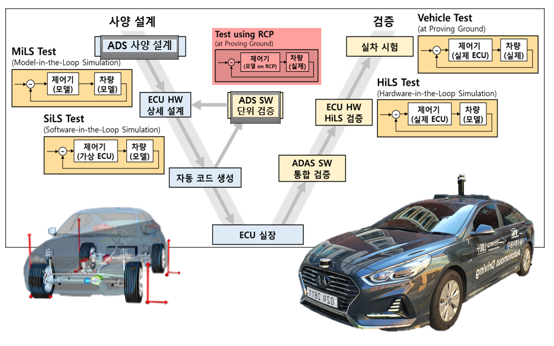
시뮬레이션 기반 자율주행 기술 개발 및 검증
다양한 시뮬레이션 환경을 활용한 자율주행 기술 개발 및 안전성 검증 연구를 수행하고 있습니다. 또한, 시뮬레이션 기반의 평가 기술 개발 연구도 진행 중에 있습니다.
시뮬레이션 검증 환경 구축
MILS / SILS / HILS / VILS / Vehicle Test 검증 환경 구축 연구
실차 시뮬레이션 기반 자율주행 기능 개발 및 검증
실제 차량과 시뮬레이션 환경을 활용한 자율주행 알고리즘 개발 및 검증 연구
ISO 26262 / SOTIF
차량 안전관련 국제 표준 기반 검증 및 시나리오 개발
경로계획 및 판단 기술
경로생성 및 추종 기술 성능 개선 연구와 더불어 자율주행 주행상황 판단 기술에 대한 연구를 진행하고 있습니다.
Path Generation and Following
경로생성 및 경로추종 기술 연구
Decision Making for Autonomous Driving
자율주행 주행상황 판단 기술 연구
Reinforcement Learning and Imitation Learning
강화학습 및 모방학습 기반 자율주행 시나리오 적용 연구

정밀지도 생성 및 지도 기반 위치인식 기술
지도생성 및 위치인식(Simultaneously Localization and Mapping, SLAM) 기술에 대한 카메라, 라이다 관점에서의 성능 개선 연구를 진행하고 있습니다. 이와 함께 HD Map 기반의 자율주행 성능 고도화 연구를 진행하고 있습니다.
Visual SLAM
영상 기반 SLAM을 통한 정밀지도 정확도 향상 및 지도 기반 위치인식 기술 연구
Lidar SLAM
포인트 클라우드 기반 SLAM을 통한 정밀지도 정확도 향상 및 지도 기반 위치인식 기술 연구
High-Definition(HD) map
정밀지도 활용을 통한 자율주행 성능 고도화 연구
Our Partners
국민대학교 지능형차량 신호처리 연구실은
자율주행 유관
기관들과의 협력을 통하여 R&D 역량을 강화해 나가고 있습니다.